
MachinePix Weekly #20: Joe Jones, inventor of the Roomba
Joe Jones talks about the hardest parts of inventing the Roomba. This week's most popular post was a special dump truck 🛻

This week I sit down with Joe Jones, the inventor of the Roomba, to discuss the challenges of shipping a home robot and the things that make a good robot 👾

The most popular post last week was a slag dump truck at a metal foundry. As always, the entire week’s breakdown is below the interview.
I’m always looking for interesting people to interview, have anyone in mind?
—Kane
Interview with Joe Jones
You started in physics and aero/astro engineering; how did you end up in robotics?
I started in physics undergrad, and I spent a year at Stony Brook for graduate studies, but we really didn’t get along. So I came back to MIT and joined the aero/astro department which was the easiest to get into at the time. I wasn't passionate about anything in particular to get a PhD in, so I took some time off and travelled, and when I came back the The Artificial Intelligence Lab (now CSAIL) at MIT was recruiting. That’s when I discovered I loved robots.
I’d always loved tinkering. I’d tried to build a satellite as a five year old. I built it out of newspaper and some D-cell batteries and some fuels I mixed up. I remember thinking “how do I light it?” so I stuck a match in the fuel tank. It didn’t fly. It was the biggest disappointment of my young life.
You were the first full-time hire at iRobot; how did you find them (or did they find you)?
It was kind of mutual. My job at the AI Lab was working on manipulator robots, but I always thought the mobile robot group led by Rod Brooks was having more fun, so I hung out there as much as I could. In 1989, the AI lab put on what they called the “AI Olympics”, which included building a robot.

Rod Brooks had written up a programming system called “Behavior Language”, which I used to program my robot, I think I was one of the only ones to use it. I thought this system really enabled practical, inexpensive systems. When I was looking for a job, I went there and Rod already knew me and they hired me.
What was the original goal when you joined iRobot?
There’s a huge gap between when I joined and when Roomba was created. In the early days, we did whatever would pay the bills. They were looking for all kinds of things—the craziest plan they had was to somehow get a rover on the moon and charge people to drive the rover around on the moon. There were many other not-as-crazy schemes. I thought iRobot was going to become the robot company, and I wanted to look for all the tasks robots could do and build as many of those as possible.
How did the Roomba come about? What inspired it?
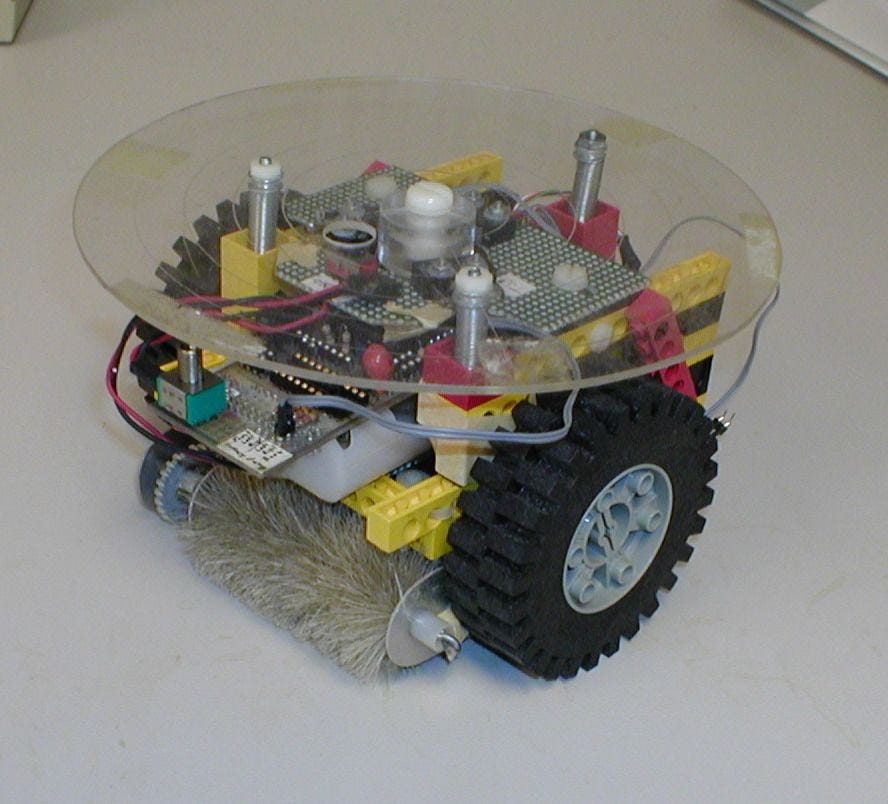
I trace Roomba’s origin back to the AI olympics, because the robot I’d built for that event was a little robot that cleaned my apartment. It was mostly made out of Lego. When I built that thing that it sort of worked. It turned out it wasn’t robust enough to be turned loose in my apartment.
It seemed that with a little extra effort we could make it a product. I took that idea with me, when the AI Lab ran out of money and all the staff got laid off, and I went to Denning Mobile Robotics. Their flagship product was the Sentry which was $75,000, but I thought there was a lot of room at the bottom for cheaper robots.
I convinced a mechanical engineer at Denning to make a little prototype to clean the floor which we did over the course of a few months. We demonstrated the prototype to Denning, and 10 days later we both got fired. The President of the company thought we were playing with toys. It was then that iRobot had just been started, but they didn’t have any money. They eventually signed a contract to build a robot for some Japanese company so I then got the job.

There still wasn’t any money, so it wasn’t until many years later, 1999, that the company felt like they could take on a product like Roomba. Another mechanical engineer and I proposed it at iRobot, and we got $10K and two weeks to build a prototype. It worked. This time, instead of getting fired, they assembled a team.
Who named it “Roomba?”
We called it Dusty Puppy, and we had a particular reason. This was the very first robot most people would have for cleaning their floors, so we wanted to invoke the idea of a puppy that was eager to please but sometimes would mess up. We thought users would be more forgiving with a name like Dust Puppy.

It turns out Dust Puppy was already taken as a name by a comic called User Friendly, and I don't think management liked it anyways, so we hired a firm to name it. Roomba is a combination of Rumba and Room since it kind of dances around the room.
Speaking of dancing around the room, did Roomba do a random walk?
Not exactly a random walk. It bounces off of walls, but it does one other thing, sometimes it follows walls. I tried to do research at the time, I was hoping there would be a paper that would tell me how to get max coverage without knowing where you were. I eventually found that paper, but by then we had discovered the random walk plus wall following. Turns out, if you followed the wall for double the length of the robot every once in a while, you got maximum coverage.
I don’t know what algorithm now, the new ones have advantages we couldn’t afford. We would have loved to use a positioning system like the new ones have.
What was the hardest challenge with shipping Roomba?
There were a series of hard challenges. The first one was the energy budget: that’s always the challenge with robots. The obvious thing was to start with a vacuum, but if you do that, you run out of batteries after a few minutes. Instead of using a vacuum, we used a carpet sweeper mechanism. This had been developed in 1876 by Bissell, so it was robust.
The biggest challenge of all was keeping the price low. We started with a financial constraint: people know how much a vacuum costs, they wouldn't pay 10x that. We wanted to sell it for $100, and we tried real hard, but it wasn’t quite possible. So we went out at $200. At the time, Electrolux put a robot vacuum on the market called Trilobite, but it was like $1400. It was only available at the flagship store in Stockholm, so we sent some people there to buy a few. They brought some back and we disassembled them. The technology was really phenomenal. They had this demo where they put a glass of white wine on the carpet, and the Trilobite would avoid it. Roomba would have knocked it over. But no one was going to pay $1400 for a vacuum cleaner.
What are some of your favorite stories you’re allowed to share?
We had this cleaning mechanism, this carpet sweeper we thought would save us. It was about two weeks before we had to commit to tooling and the factories would machine the steel for the tools.

We decided to test it one last time, threw some surrogate dirt on the floor—and it didn’t pick it up! This was a surprise to us, and we were two weeks before the deadline. I tried to figure it out. I took it to a lab where we had a glass table, and I put cheerios on the table and watched from underneath. It turned out we had totally misunderstood how the mechanism worked. We thought the brushes picked up debris which was then combed off into the bin. What really happens is it’s chaos—the brushes just flick stuff everywhere, and every once in a while some of it statistically bounces into the bin. So we made the capture shroud a little bigger. You always assume the best solution is really complicated or elegant. Sometimes it’s really dumb.

We thought we had solved our energy envelope by using the carpet sweeper instead of a vacuum. We ran a focus group, with a big one way mirror, bunch of engineers on one side, etc. The facilitator had shown the focus group that the Roomba worked, but she had never mentioned the mechanism. At some point, she mentioned there was no vacuum but a sweeper. She had already asked how much people would be willing to pay, but once people learned it was a sweeper and not a vacuum, people’s willingness to pay was halved. Not because it performed less well, but because it technically wasn’t a vacuum.

A product manager said we had to include a vacuum—even if it didn’t make things better—it needed a vacuum to sell. At the time we had 30W to work with in the entire Roomba, and maybe 3W to implement a vacuum. Your wall vacuum might use 1400W. So we discovered we made the vacuum inlet very thin, we could implement a very small vacuum. It works better on hard floors. It was a funny last minute challenge.
How has Roomba remained so successful? What makes a good robot?
I thought a lot about this in the early days. When I stared at the AI Lab, and discovered that robots were my calling—this was 1982—I was predicting robots would be everywhere in 5 years. 5 years later, robots still weren’t doing anything, and I was trying to figure out why.
I concluded roboticists loved robots too much. The people building robots thought that the way to success was packing technology in. You really have to build something that solves a task that people really want done. Often I see tasks as an excuse to build a robot that someone just wants to build. Other times, there’s a task that people want done, but the technology is way beyond the state of the art and you run out of money. Finally, sometimes people build robots, where people want the task, and the technology works, but the cost is just too high. Nobody pays more just because it’s a robot.
Those were the things we thought about with Roomba, and they all came together. Useful robots are hard. Clever, reliable, cheap—that’s just really hard.
A few years ago I was excited to run across one of those rare applications that, like floor cleaning, is really well suited to a robot. My new company developed Tertill, a little solar-powered robot. Tertill lives in home gardens and eliminates the chore of weeding. Earlier this year iRobot co-founder Helen Greiner recognized the opportunity and joined us as CEO. We’re expecting Tertill to have an impact similar to Roomba.
Any side projects you’re working on right now?
I’m working on one or two, but I can’t really talk about those.
What are you reading these days?
The thing I have to admit, the thing I’m reading right now is the latest book in The Murderbot Diaries series by Martha Wells. It’s a lot of fun.
What’s your favorite simple (or not so simple) tool or hack that you think is under-appreciated?
The thing I rely on most when developing most is cardboard and packing tape. I’ve built so many things with just cardboard and packing tape. 3D printing is a wonderful thing but still takes hours. Cardboard can take a few minutes. A lot of things on Roomba were developed with cardboard. The vacuum and shroud I talked about were developed with cardboard.
The Week in Review
Disney Research makes some really cool robots, including the Stuntronics stunt robot.

I found this after a previously posted magnetic aligner had me wondering what a fully automated system would look like.

This week’s most popular post. Extremely specialized truck. Some followers wondered if energy could be recovered, and:

Wonderful demonstration of operator dexterity here.

Clever solution! Reminds me of the previously posted bead aligner.

Postscript
My mother’s first attempt at kintsugi:
If you enjoyed this newsletter, forward it to friends (or interesting enemies). I am always looking to connect with interesting people and learn about interesting machines—reach out!
—Kane